Trimble Lassen iQ GPS Receiver
|
|
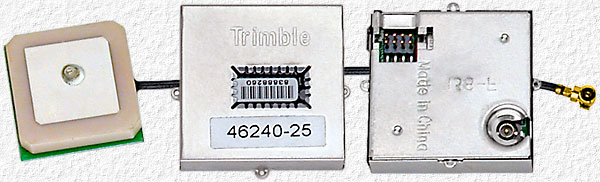 Embedded Antenna & Lassen iQ Receiver Top + Bottom Views 32.4 ma. @ 3.3 VDC ( Receiver = 24.6 ma. - Active Antenna = 7.8 ma.) |
|
|
After the Lassen LP was lost on SABLE-2, I finally had the excuse needed to buy some of the newer Trimble receivers I had been wanting to try, like a Lassen iQ and a Copernicus along with Ultra Compact Embedded Antennas, which are smaller, lighter & require even less power then the Lassen LP. It's a long story, but by the time a problem with the iQ receiver was found, I had purchased 4 of the receivers along with 4 of the Ultra Compact Embedded Antennas to rule out having one or more faulty units. I had been testing the receivers using a SparkFun USB evaluation board connected to my main PC and it turns out that all 4 of the iQ receivers become extremely deaf anywhere near that particular PC where none of my 6 other GPS receivers have a problem and which I'm guessing is due to some spurious signal the PC emits and poor iQ receiver selectivity. The iQ receiver appears to work fine next to other PCs, worked fine during the SABLE-3 flight and I plan to use it for more flights, but need to study this issue more. The only other issue I have with the iQ GPS, is its tiny connector that makes connecting to the receiver difficult unless one uses a circuit board with an equally tiny SMD connector or is able to find a flexible cable with a factory installed connector to use, although this isn't much different then with most newer receivers as they continue to become smaller. Update - An iQ GPS was used for BEAR-3 with no problems, but it had a problem dealing with RFI from the camera aboard BEAR-4 so I doubt I'll use an iQ on further flights unless accompanied by a backup tracker. The camera used for the BEAR-4 flight was a Canon IVIS HF20. IVIS is the Japanese version of the Vixia HF20 sold in N.A. and the two are identical except for the name (and maybe the choice of Japanese, in addition to English, for menus that Tomoya used in the IVIS version that he brought with him from Japan. Testing the camera after the BEAR-4 flight revealed that it had a variable frequency switching power converter and that bands of noise, with a signal every 460-700 kHz, from about 100 to 430 MHz were present at levels up to −67 dbm on it's power leads from the battery which had also powered the BEAR-4 GPS receiver. No tests were done to confirm the iQ receiver is susceptible to interference from signals within this range, but everything certainly leads to this being so and I only plan to waste time doing further tests if I ever find myself with nothing better to do. For more on this receiver, see the SABLE-3 Tracker, BEAR-3 and BEAR-4 pages.
|
| To BEAR Home Page |